Soft Robots
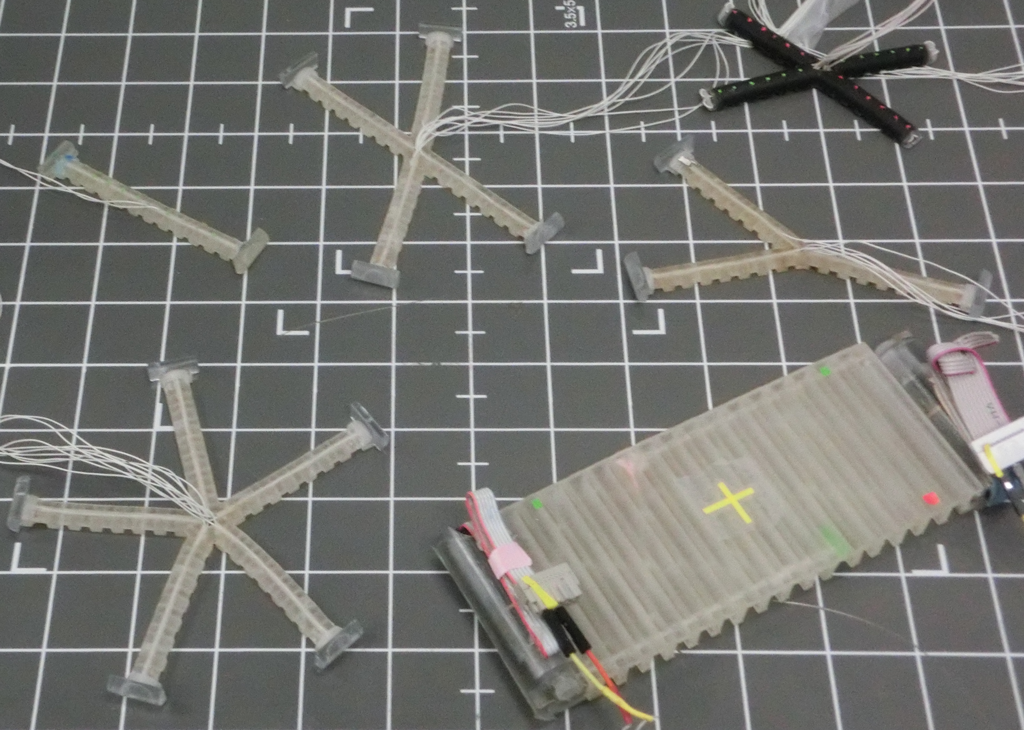
Locomotion of soft material robot actuated by shape memory alloys (SMAs)
RoboSoft 2020
|
Motor Tendon Actuated
|
|
|
|
|
|
P18. A. N. Mahendran, C. Freeman, A. Chang, M. McDougall, P. Vela and V. Vikas . "Multi-gait Locomotion Planning and Tracking for Tendon-actuated Terrestrial Soft Robot (TerreSoRo)." 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023). [Article Link, arxiv, Youtube Video]
|
|
|
P16. H. Bezawada, C. Woods and V. Vikas, "Shape reconstruction of soft manipulators using vision and IMU feedback'", IEEE Robotics and Automation Letters (RA-L), 2022. [Article Link, YouTube Video].
|
|
|
P14. C. Freeman, M. Maynard and V. Vikas "Topology and morphology design of spherically reconfigurable homogeneous Modular Soft Robots (MSoRos)", Soft Robotics [arxiv, Article Link, Youtube Video].
|
|
|
P13. A. Chang, C. Freeman, A. N, Mahendran, V. Vikas and P. Vela, "Shape-centric Modeling for Soft Robot Inchworm Locomotion", 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021) [10.1109/IROS51168.2021.9636695].
|
|
|
P8. V. Vikas, E. Cohen, R. Grassi, C. Sozer and B. Trimmer, "Design and locomotion control of soft robot using friction manipulation and motor-tendon actuation", IEEE Transactions on Robotics, Aug 2016 [DOI:10.1109/TRO.2016.2588888]
|
|
|
P5. V. Vikas, P. Grover and B. Trimmer, “Model-free control of multi-limb soft robots”, IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2015. [DOI:10.1109/IROS.2015.7353509], [arXiv]
|
|
Accessibility | Equal Opportunity | UA Disclaimer | Site Disclaimer | Privacy | Copyright © 2019
The University of Alabama | Tuscaloosa, AL 35487 | (205) 348-6010 Website provided by the Center for Instructional Technology, Office of Information Technology |

|